
價(jià)格:6561元瀏覽:128次聯(lián)系:王文影 / 13231713280 / 企業(yè):河北威岳機(jī)械有限公司留言店鋪收藏
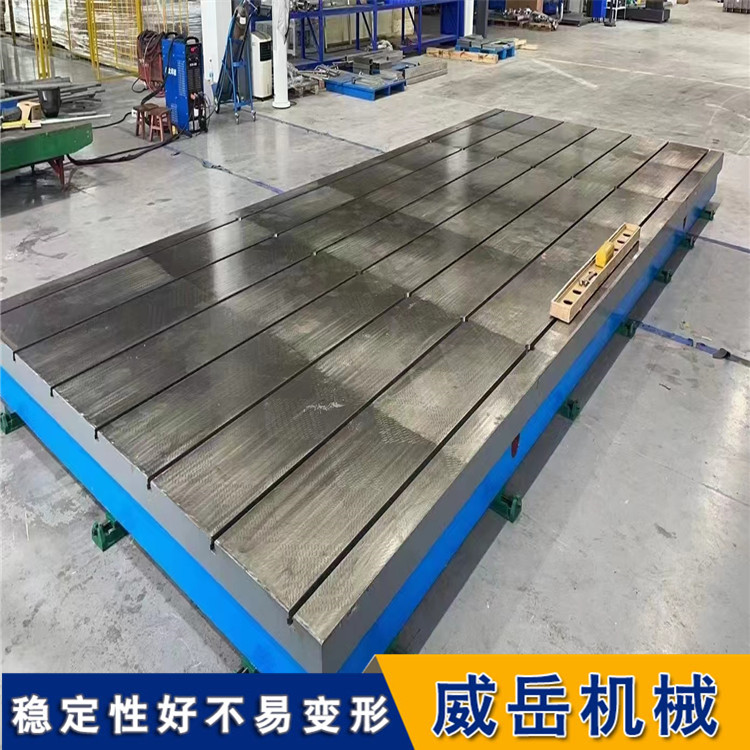
鑄鐵焊接平臺(tái)用于檢查零件的尺寸精度或形位偏差,并作劃線,適用于各種檢驗(yàn)工作,測(cè)量的基準(zhǔn)平面。鑄鐵焊接平臺(tái)在使用時(shí)要先進(jìn)行安裝調(diào)試,然后把鑄鐵焊接平臺(tái)的工作面清理干凈,在確認(rèn)沒有問題的情況下使用,使用過程中,要注意避免工件和平板的工作面有過激的碰撞,防止損壞檢驗(yàn)平臺(tái)的工作面;工件的重量不能超過檢驗(yàn)平臺(tái)的額定載荷,否則會(huì)造成工作質(zhì)量降低,損壞平板的結(jié)構(gòu),甚至?xí)斐善桨遄冃危怪疅o法使用。
鑄鐵焊接平臺(tái)按標(biāo)準(zhǔn)實(shí)行定期周檢,檢定周期根據(jù)具體情況可為6-12個(gè)月。包裝:鐵板包裝和木制包裝兩種形式,平臺(tái)表表用塑料膜封裝,這種包裝適于平板內(nèi)陸運(yùn)輸,并有良好的防潮、防震、防銹和防野蠻裝卸等保護(hù)平板的措施,以確保運(yùn)抵現(xiàn)場(chǎng)。
鑄鐵焊接平臺(tái)主要采用三相異步電機(jī)通過齒形同步帶驅(qū)動(dòng)雙節(jié)距鏈輪鏈條,帶動(dòng)治具在預(yù)定的導(dǎo)軌上移動(dòng),該鏈條上按照既定的節(jié)距均布十三個(gè)治具,帶動(dòng)產(chǎn)品在預(yù)定的五個(gè)工位上依次移動(dòng)。
1)采用ROBOT將上工段的產(chǎn)品來料擺放在上料工位的治其上,循環(huán)機(jī)構(gòu)上的光電感應(yīng)器1進(jìn)行來料檢淵,待PLC接收到光電感應(yīng)器反饋的_L料信號(hào)后,驅(qū)動(dòng)三相電機(jī)帶動(dòng)鏈條上的載具進(jìn)行移位;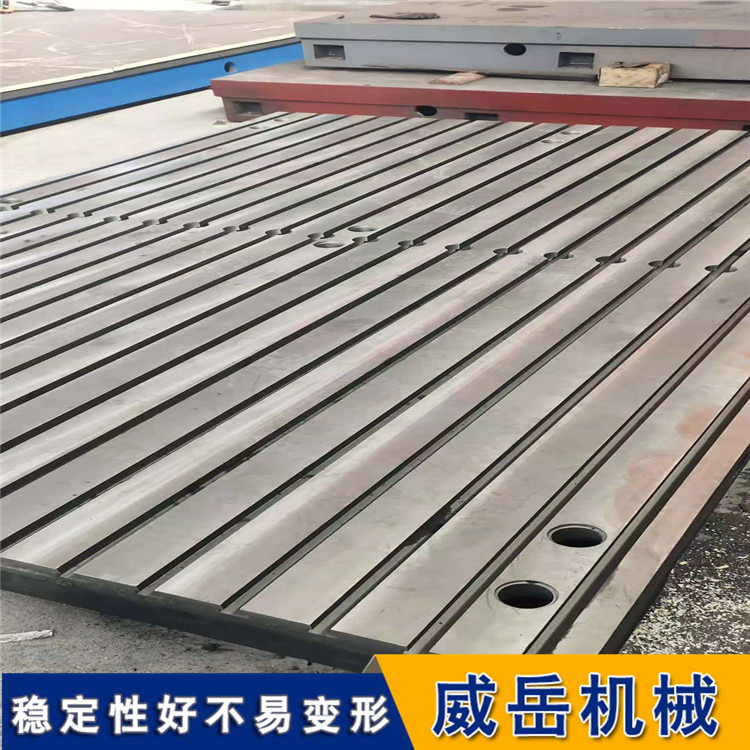
2)分布在循環(huán)機(jī)構(gòu)上的八套B產(chǎn)品供料機(jī)構(gòu)自動(dòng)給料,柔性?shī)A持裝置夾取產(chǎn)品后經(jīng)筆型對(duì)射光纖傳感器檢側(cè)B產(chǎn)品是否夾取到位,夾取到位后.在循環(huán)機(jī)構(gòu)的預(yù)定位置_L待料:
3)通過光電感應(yīng)器2檢側(cè)到產(chǎn)品A到達(dá)焊接工位一后,采用氣缸帶動(dòng)楔形定位裝置對(duì)治具進(jìn)行定位,同時(shí)循環(huán)機(jī)構(gòu)上方的產(chǎn)品定位裝里對(duì)產(chǎn)品A梢確定位:
4)待預(yù)設(shè)在產(chǎn)品A定位裝置上的反射光纖感應(yīng)器槍側(cè)到信號(hào)正常后.等待在上方的B產(chǎn)品進(jìn)行定位貼合,此時(shí),焊接ROBOT進(jìn)行定位并焊接:焊接的同時(shí),上料工位上接受上工段的來料:
5)出料機(jī)械手出料,同時(shí)各工位進(jìn)行循環(huán)工作。
焊接平臺(tái)精度:按標(biāo)準(zhǔn)計(jì)量檢定規(guī)程執(zhí)行,分別為0、1、2、3四個(gè)級(jí)別。3級(jí)精度以上的鉚工平臺(tái)用做檢驗(yàn)、劃線、裝配等使用,4級(jí)精度以下的鉚工平臺(tái)一般用做鉚焊等使用。鉚工平臺(tái)適用于各種檢驗(yàn)工作,精度測(cè)量用的基準(zhǔn)平面用于機(jī)床機(jī)械檢驗(yàn)測(cè)量基準(zhǔn),檢查,并作零件的尺寸精度或行為偏差,并作劃線,在機(jī)械制造中也是不可缺少的基本工具。
業(yè)務(wù)咨詢:932174181 媒體合作:2279387437 24小時(shí)服務(wù)熱線:15136468001 盤古機(jī)械網(wǎng) - 全面、科學(xué)的機(jī)械行業(yè)免費(fèi)發(fā)布信息網(wǎng)站 Copyright 2017 PGJXO.COM 豫ICP備12019803號(hào)